Machine Design of a Chewing Simulator
May 2024
Objective: To design and build a chewing simulator that can mimic the chewing motion of the human jaw, that is able to conduct a variety of experiments done by a PhD candidate at Monash University.
This project was supervised by Professor Jing Fu in collaboration with Professor Luca Fiorenza researching dental anthropology at Monash University. Team members that helped drive the project to completion were Paulus Bagas Pamungkas and Isitha Herath.
Initial Stage:
Outline of aim and objectives of the project.
Project Scheduling with Gantt Chart.
Literature review that encompassing the nature of chewing and 5 previous machines that already exist in this space, analysing its strengths and weaknesses
Clear Outline of high level requirements, financial requirements based on budget and Functional and non functional requirements.
Insight: human biting force can achieve very high forces (world record is at 442 kg).
Design Details :
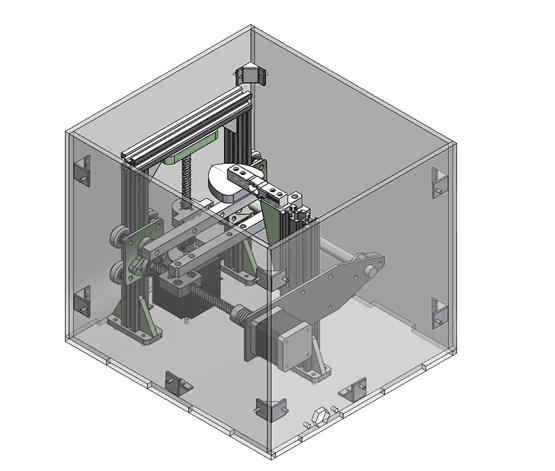
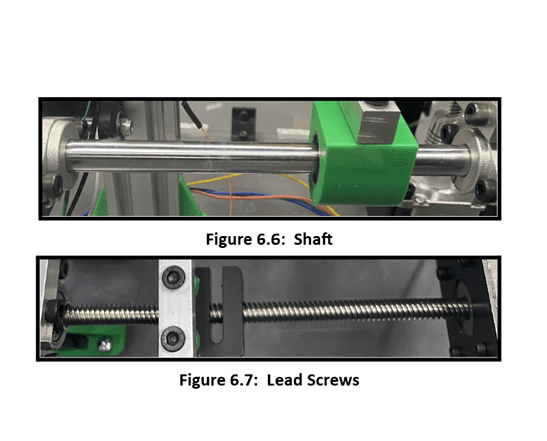
Multiple concept generation but final design was consolidated with a lead screw actuation inspired from 3D printer designs.
I designed the CAD model using SolidWorks, employing good practices.
Design Approval from project stakeholders.
FEA analysis done on major load bearing components & design modifications.
BOM drafted.
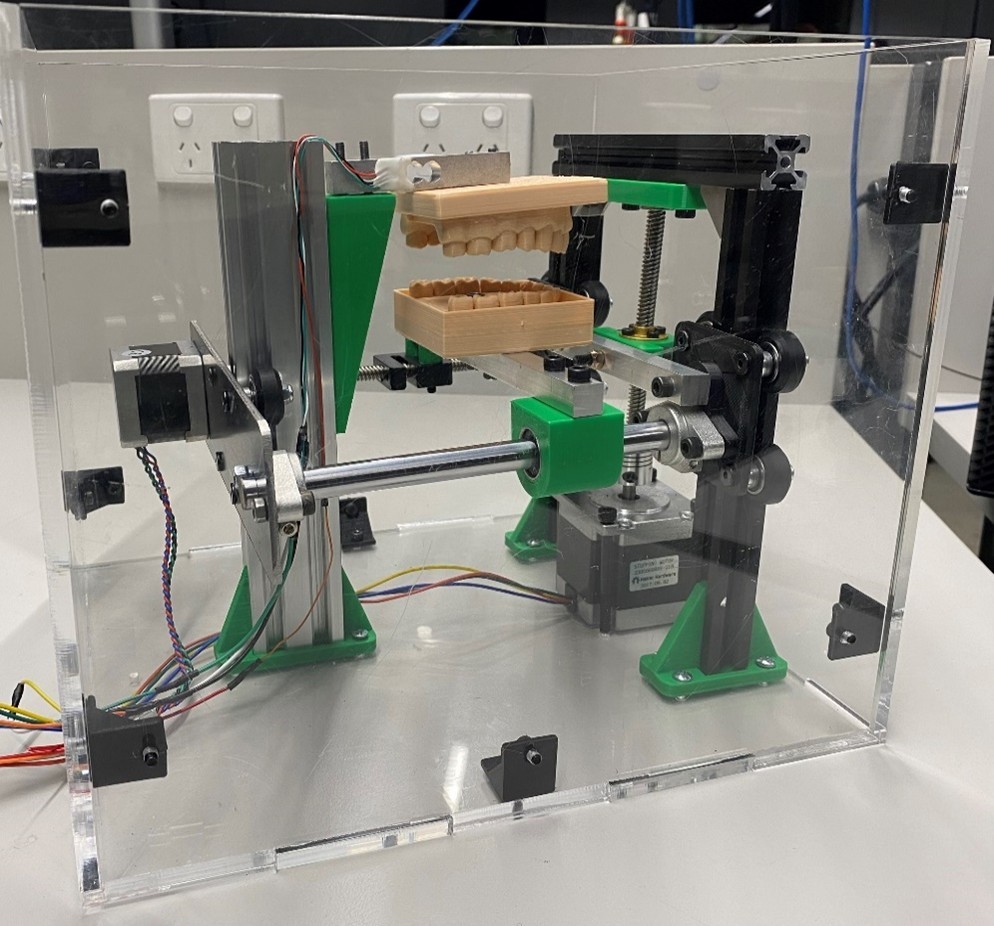
Build Face:
Outsourcing hardware components and electrical components like sensors, cabling, motor drivers.
Printing parts using the Prusa Mk4 with available PLA plastic.
Using the Guillotine to cut to size the metal steel plate, then drilling holes with a drill press.
Using the hacksaw to cut the leadscrews and aluminium square rod.
Laser cutting the acrylic outer casing
Assembling all the components
Interfacing and electrical System:
Driving Nema 23 and Nema 17 stepper motors using the open source AccelStepper library (on the arduino IDE), creating a smooth transition in motion.
Calibrating the Load Cell and implementing a safety switch.
Making a functional and friendly interface for the user to control the machine.
Testing refining movement to achieve clean adequate force readings.
Other Aspects:
Extensive progress and Final report drafted to document the process.
Risk assessment to comply with safety standards at the university.
Presenting to multiple guests at the Final Year Project Fair.
Project Hand Over.
Important note. first time I had the opportunity to drive a product from project requirements to final build and testing. I also was exposed to driving stepper motors, soldering wires, managing electric power supply to the system.



Next Project